ceph-csi源码分析(3)-rbd driver-服务入口分析
更多ceph-csi其他源码分析,请查看下面这篇博文:kubernetes ceph-csi 分析 - 目录导航:
当ceph-csi组件启动时指定的driver type为rbd时,会启动rbd driver相关的服务。然后再根据、的参数配置,决定启动与,或与。
基于tag v3.0.0
https://github.com/ceph/ceph-csi/releases/tag/v3.0.0
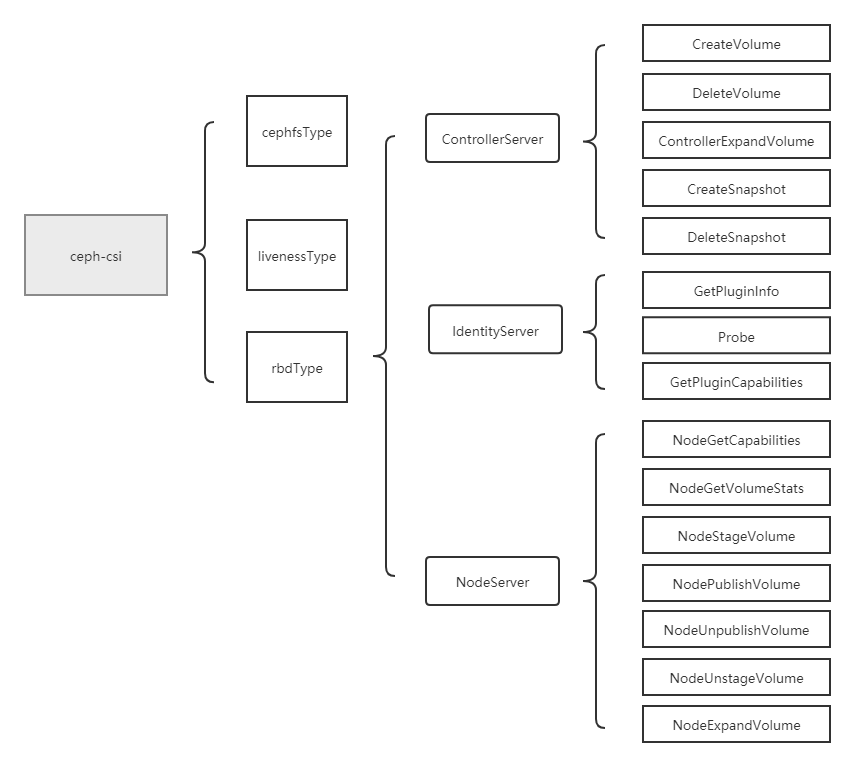
rbd driver分析将分为4个部分,分别是服务入口分析、controllerserver分析、nodeserver分析与IdentityServer分析。
这节先进行服务入口分析。
服务入口分析
main
分析入口,根据不同的type,初始化对应的driver,并调用driver的启动方法。
......
switch conf.Vtype {
case rbdType:
validateCloneDepthFlag(&conf)
validateMaxSnaphostFlag(&conf)
driver := rbd.NewDriver()
driver.Run(&conf)
case cephfsType:
driver := cephfs.NewDriver()
driver.Run(&conf)
case livenessType:
liveness.Run(&conf)
default:
klog.Fatalln("invalid volume type", conf.Vtype) // calls exit
}
......
Run(rbd)
rbd driver的启动方法。
主要逻辑:
(1)创建ceph.conf文件用于执行cli命令;
(2)创建CSIDriver ,注册driver对外的服务能力,即拥有哪些功能;
(3)创建IdentityServer;
(4)根据启动参数配置,决定创建nodeserver,还是创建controllerserver;
(5)创建grpc server,并注册前面创建的几个server;
(6)启动grpc server。
// internal/rbd/driver.go
type Driver struct {
cd *csicommon.CSIDriver
ids *IdentityServer
ns *NodeServer
cs *ControllerServer
}
// Run start a non-blocking grpc controller,node and identityserver for
// rbd CSI driver which can serve multiple parallel requests.
func (r *Driver) Run(conf *util.Config) {
var err error
var topology map[string]string
// 创建ceph.conf文件用于执行cli命令
// Create ceph.conf for use with CLI commands
if err = util.WriteCephConfig(); err != nil {
klog.Fatalf("failed to write ceph configuration file (%v)", err)
}
// Use passed in instance ID, if provided for omap suffix naming
if conf.InstanceID != "" {
CSIInstanceID = conf.InstanceID
}
// update clone soft and hard limit
rbdHardMaxCloneDepth = conf.RbdHardMaxCloneDepth
rbdSoftMaxCloneDepth = conf.RbdSoftMaxCloneDepth
skipForceFlatten = conf.SkipForceFlatten
maxSnapshotsOnImage = conf.MaxSnapshotsOnImage
// Create instances of the volume and snapshot journal
volJournal = journal.NewCSIVolumeJournal(CSIInstanceID)
snapJournal = journal.NewCSISnapshotJournal(CSIInstanceID)
// 创建CSIDriver ,注册driver能力
// Initialize default library driver
r.cd = csicommon.NewCSIDriver(conf.DriverName, util.DriverVersion, conf.NodeID)
if r.cd == nil {
klog.Fatalln("Failed to initialize CSI Driver.")
}
if conf.IsControllerServer || !conf.IsNodeServer {
r.cd.AddControllerServiceCapabilities([]csi.ControllerServiceCapability_RPC_Type{
csi.ControllerServiceCapability_RPC_CREATE_DELETE_VOLUME,
csi.ControllerServiceCapability_RPC_CREATE_DELETE_SNAPSHOT,
csi.ControllerServiceCapability_RPC_CLONE_VOLUME,
csi.ControllerServiceCapability_RPC_EXPAND_VOLUME,
})
// We only support the multi-writer option when using block, but it's a supported capability for the plugin in general
// In addition, we want to add the remaining modes like MULTI_NODE_READER_ONLY,
// MULTI_NODE_SINGLE_WRITER etc, but need to do some verification of RO modes first
// will work those as follow up features
r.cd.AddVolumeCapabilityAccessModes(
[]csi.VolumeCapability_AccessMode_Mode{csi.VolumeCapability_AccessMode_SINGLE_NODE_WRITER,
csi.VolumeCapability_AccessMode_MULTI_NODE_MULTI_WRITER})
}
// 创建IdentityServer
// Create GRPC servers
r.ids = NewIdentityServer(r.cd)
// 创建nodeserver
if conf.IsNodeServer {
topology, err = util.GetTopologyFromDomainLabels(conf.DomainLabels, conf.NodeID, conf.DriverName)
if err != nil {
klog.Fatalln(err)
}
r.ns, err = NewNodeServer(r.cd, conf.Vtype, topology)
if err != nil {
klog.Fatalf("failed to start node server, err %v\n", err)
}
}
// 创建controllerserver
if conf.IsControllerServer {
r.cs = NewControllerServer(r.cd)
}
if !conf.IsControllerServer && !conf.IsNodeServer {
topology, err = util.GetTopologyFromDomainLabels(conf.DomainLabels, conf.NodeID, conf.DriverName)
if err != nil {
klog.Fatalln(err)
}
r.ns, err = NewNodeServer(r.cd, conf.Vtype, topology)
if err != nil {
klog.Fatalf("failed to start node server, err %v\n", err)
}
r.cs = NewControllerServer(r.cd)
}
// 创建grpc server,注册前面创建的几个server并启动grpc server
s := csicommon.NewNonBlockingGRPCServer()
s.Start(conf.Endpoint, conf.HistogramOption, r.ids, r.cs, r.ns, conf.EnableGRPCMetrics)
if conf.EnableGRPCMetrics {
klog.Warning("EnableGRPCMetrics is deprecated")
go util.StartMetricsServer(conf)
}
s.Wait()
}