自动驾驶感知功能一般都有啥?(28天写作 Day9/28)
在现阶段的量产车上,自动(辅助)驾驶都有什么相关硬件呢?
理想ONE标配辅助驾驶系统,采用Mobileye EyeQ4 视觉芯片,搭配Bosch超声波雷达、毫米波雷达及iBooster 2.0电子制动系统。全车共搭载12个超声波雷达、5个高清摄像头、1个毫米波雷达 (文献[1])
小鹏P7可配置的XPILOT 自动驾驶辅助系统含有:高精毫米波雷达,超声波传感器,自动驾驶环视摄像头,自动驾驶高感知摄像头(文献[2])
NIO Pilot在传感器方面配备1个前向三目摄像头、4个环视摄像头、5个毫米波雷达、12个超声波传感器、1个驾驶状态监测摄像头。(文献[3])
在 Model 3 上,特斯拉标配了 8 颗摄像头,1 颗雷达和 12 颗超声波传感器。至于 LiDAR,Musk 则选择无视。(文献[4])
上面提到的硬件包含:
高清摄像头
环视摄像头
毫米波雷达
超声波雷达
激光雷达(LiDAR)
根据文献[5],ADS中的摄像头可分为单眼摄像头(monocular camera)、全景式摄像头(Omnidirectional/stereo camera)以及事件摄像头(event camera)等。
雷达,中文比较混淆。
根据文献[6]的定义:
雷达(RADAR),是英文“Radio Detection and Ranging”(无线电侦测和定距)的缩写及音译。将电磁能量以定向方式发射至空间之中,借由接收空间内存在物体所反射之电波,可以计算出该物体之方向,高度及速度,并且可以探测物体的形状。
按工作波长分类: 米波雷达、分米波雷达、厘米波雷达、毫米波雷达、激光/红外雷达......
我们小白可以简单理解为:摄像头+雷达。
那摄像头和雷达都分别有什么用处/优势呢?
先看个图(来自文献[5])。
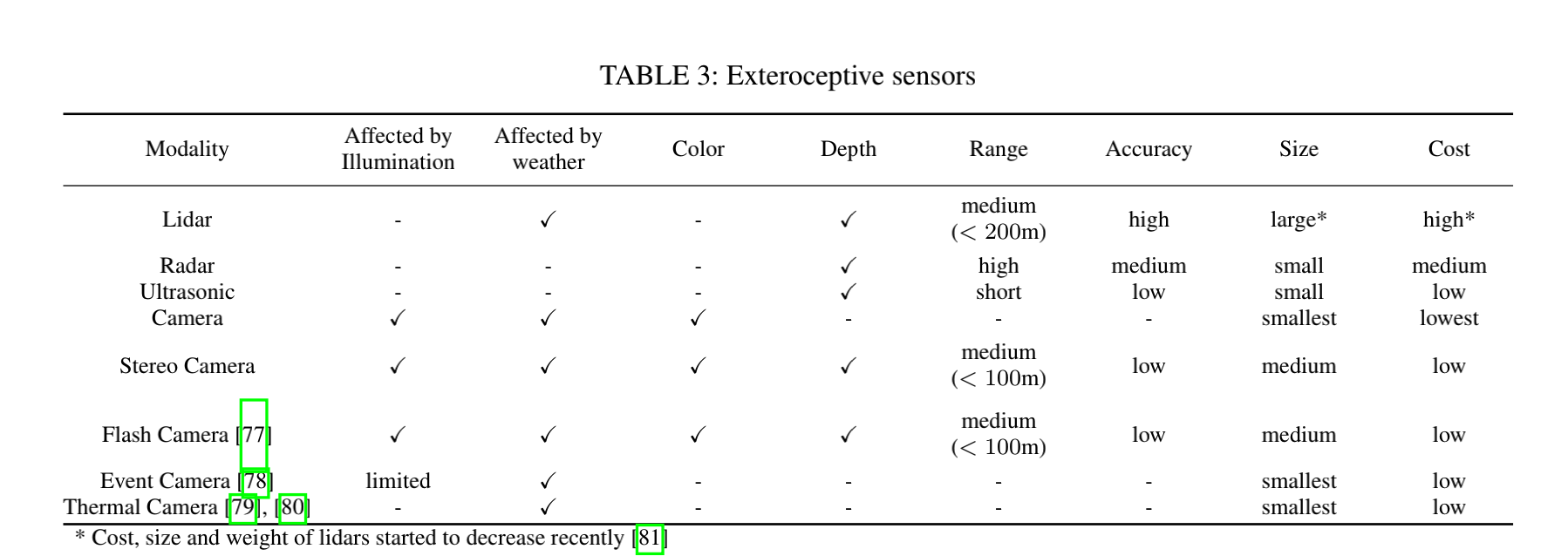
大致列举下对比要点:
摄像头是感知色彩的,属于被动感知器。
优点:不发射信号,不会干涉其他系统。成本便宜。
缺点:照明(illumination)条件会严重制约其性能。距离(深度)信息不易感知计算。
雷达:属于主动感知,需要发射信号,通过反射回来的信号来感知3D信息。
优点:不受照明条件限制。计算距离(深度)信息非常高效。
缺点:成本贵,尤其是Lidar,最近听说降下来不少。
其他:Radar距离探测距离比LiDAR远,但后者更准。
除了外部感知器,还有本体感知器(Proprioceptive sensors):
wheel encoder, 车轮角度编码器:量距
IMU(Inertial Measurement Units),惯性测量单元:监测速度和位置的变化
转速表:测速度
等等
CAN协议,控制器局域网协议:这些信息的传输协议。
那么,自动驾驶里面感知这块都干些什么事情?
大致有:
物体感知物体侦测(object detection):在哪里(位置)、多大(大小)
物体识别(object recognition):啥东西
物体追踪(object tracking):怎么移动的,动起来还能一直锁定住
定位(localization)/坐标变换: 本机和环境位置关系的计算
道路和车道识别(road and lane detection)
参考文献
[5] Yurtsever E, Lambert J, Carballo A, et al. A survey of autonomous driving: Common practices and emerging technologies[J]. IEEE Access, 2020, 8: 58443-58469.